
Virtual inertia is a fundamentally different mechanism to fast frequency response (FFR).
To demonstrate, let’s look at how the Dalrymple Battery Energy Storage System (BESS), currently the only source of virtual inertia on the National Electricity Market (NEM) responded during the South Australia separation event on the 16/11/2019 at 6:05pm (discussed here earlier on WattClarity). The Dalrymple BESS is a grid forming inverter, while all other large-scale BESS on the NEM are grid following – Gannawarra, Ballarat, Lake Bonney and Hornsdale.
The below plots show the South Australian grid frequency; top, and Dalrymple BESS response (current waveform output); bottom.
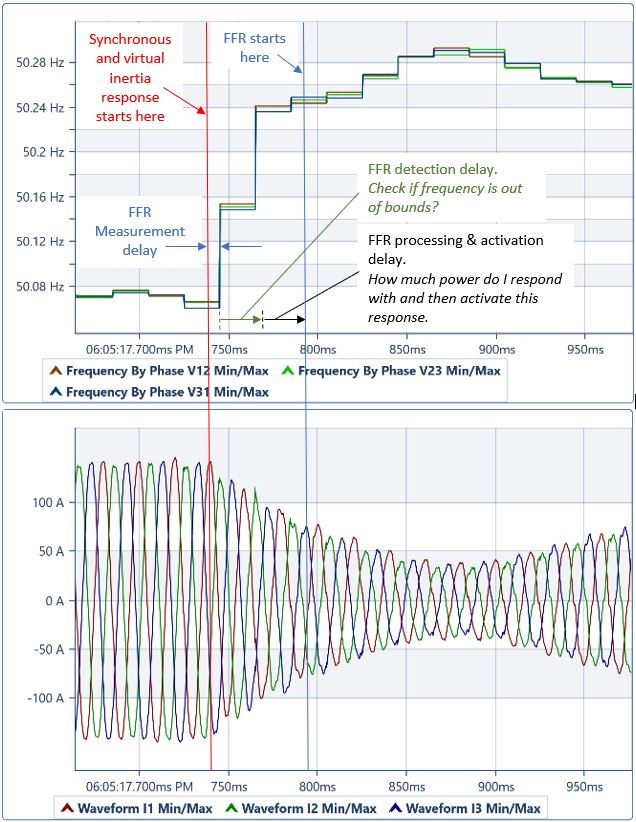
The separation of South Australia’s power system from the NEM caused an over frequency event seen in the top figure which requires a reduction in active power output within South Australia to correct. Dalrymple BESS can be seen in the bottom figure to respond at the red line where the output begins to reduce in the bottom plot (yes, it responds before the frequency is even measured to be increasing in the top figure, more on that soon). This is virtual inertia from a grid forming inverter. The response is inherent and immediate as seen in these plots. This is because the grid frequency moves away from the internal frequency/speed of the inverter at the red line – rather than the BESS responding to the grid. Being a grid forming inverter – it has its own independent, internal frequency/speed (this also allows it to form an islanded grid by generating a frequency reference, hence the name). It does not use a phase lock loop or rely on the grid frequency. The internal frequency/speed of the grid forming inverter doesn’t change instantaneously when the grid frequency changes, just like a spinning mass, it takes time to speed up or slow down – it has inertia (which is settable unlike a physical mass).
Synchronous machines provide inertia when the grid frequency is higher or lower than the frequency/speed of its spinning mass. This difference causes an active power transfer. Grid forming inverters use this same mechanism. The grid frequency will increase or decrease from the inverter’s internally generated frequency/speed and this difference causes an active power transfer though the same laws of physics. Real power transfer is proportional to the phase angle between two voltage sources, irrespective of that voltage source being electro-mechanical or power-electronic.
Grid following inverters on the NEM would begin responding at the blue line. This is an approximation, but there will always be a delay with this approach; which is the key distinction to be made. The delay is because they wait and respond to the grid and will always have a measurement delay. This measurement delay is clear to see between the red line and the frequency rise in the top plot. There is also a delay to detect that the grid frequency is out of bounds once measured, then processing and activation of the appropriate response. That can all happen very quickly, but it still requires 10’s to 100’s of milliseconds to perform these steps. So FFR will always have a delay between the event and the commencement the of the response by nature of it measuring and responding to the condition of the grid frequency.
As mentioned prior, you can see in the plots that the red line, where the inertial response starts, is before the high-speed data recorder measures the frequency increasing – that is because virtual inertia doesn’t rely on measurement. The data recorder is sampling very quickly but it is not instantaneous and as such, you cannot rely on measurement to deliver inertia. At the red line the grid’s frequency moves away from the inverter’s causing a mismatch between the grid forming inverter’s internal frequency/speed and the grid’s frequency – causing an inherent and immediate response as seen in the plots.
That is the primary difference between the two – virtual inertia is inherent due to the physics of two interconnected voltage sources whereas FFR will always have a small delay and is reliant on measurement
Why is this important? It depends on how much trouble the grid can get into in that 10 to 100 millisecond delay. Right now, most power systems will be OK but as more synchronous generators retire this won’t be the case. The frequency will fall or rise much quicker if there is less inertia in the system, making this technology and virtual inertia as a service more and more critical moving forward. FFR is an important service in its own right, responding quicker than traditional assets helps address the challenge of faster frequency rises and falls, but it is not inertia and is not a direct substitute for inertia. In high renewable, large interconnected power systems, a level of inertia, synchronous or virtual, will be required to manage the first moments post disturbance. Faster responses and faster control systems will allow us to operate lower inertia systems but not a no inertia system.
Virtual inertia and FFR are both valuable to the grid but they are very different as described. Understanding these differences will be critical in extracting the most value from each service and enabling a high renewable energy NEM.
This article was originally published on LinkedIn and has been reprinted with the author’s permission.
——————————————-
About our Guest Author
 |
Stephen Sproul is a Senior Engineer working in the fields of Microgrids and Energy Storage for ABB.
Stephen has extensive experience working in the North American, European, United Kingdom and Australian power industries. Stephen is a former E.S Cornwall memorial scholar. You can find Stephen on LinkedIn here. |
If I read this correctly could it be said that the battery is detecting the phase error between its internal clock and the grid and that phase error initially is much easier to detect than frequency change. There is still a measurement delay but it is much shorter, it can be a few degrees of rotation rather than a few revolutions. In that case it could be analogous to a servo control position system which has an outer position loop (frequency) and an inner velocity loop (phase). Then there is the question of voltage which must also have risen but I suspect that detection of voltage changes is much slower than phase differences.
Whichever way you activate it it is quite important in the first 20-200 msec and would reduce the chance of overshoot in response quite significantly.
Can we assume the same applies to synthetic inertia on solar farms and wind turbines
This article seems to claim that the grid forming inverter deployed at the Dalrymple BESS are actually able to provide an instantaneous “synthetic inertia response” performing like any synchronous generators. Let me just quote two peer-reviewed results on this topic :
1)”Effects of decreasing synchronous inertia on power system dynamics” – 12 June 2019
https://onlinelibrary.wiley.com/doi/pdf/10.1002/2050-7038.12128
“One of the main questions is how efficiently synthetic inertia can substitute direct physical response of the system (synchronous inertia). Published results show that response times are in the range of 50 to 200 ms, which are very fast, but in relation to time constants of dynamic power system events, they are far from being instantaneous.”
2)”Electric power system inertia: requirements, challenges and solutions”
https://www.researchgate.net/publication/327105525_Electric_power_system_inertia_requirements_challenges_and_solutions
“For power electronic connected technologies, delivering synthetic inertia and/or fast frequency control, there is a delay between the event the device’s response. The response time can be represented by a combination of the following four different parameters:
– Measurement time, which is the time needed to detect and measure the RoCoF (or frequency in case of FFC)
– Signal time, which is the time required to get the activation signal from the measurement device to the FAR device.
– Activation time, which is the time required from the FAR device to deliver the initial power response once it received the activation signal.
– Ramping time, which is the time required from the FAR to ramp up to the required active power setpoint.
However, an adequate response time depends on the system dynamics and requirements such as system inertia and RoCoF limits.”
Please can you provide the response time, to any Ro.Co.F event, of the grid forming inverter you are talking about?
Many thanks
Hi Francesco.
Thanks for the comprehensive comment. Your question strikes at my motivation to write the article – to clearly distinguish between virtual inertia and FFR.
Due to a lack of clear definitions – many people use the terms virtual/synthetic inertia and FFR interchangeably or as one in the same. However, I describe two very different mechanisms in the article, each with their own benefits as discussed. Grouping synthetic inertia and FFR as the same service doesn’t allow people to distinguish between them and undermines their use for certain applications. This is echoed in many papers eg:
“Many studies on synthetic inertia do not focus on distinction between inertia and fast frequency response. From a system perspective, important measures of frequency stability are the minimum instantaneous frequency, and RoCoF. A relaxed view on synthetic inertia might include services which contribute to improving the response of the system, such as lifting the minimum instantaneous frequency, and reducing RoCoF. However, a more strict, unified view of this term would lead to a clearer picture of services being offered to improve system stability.”
(https://www.researchgate.net/publication/321104126_Synthetic_inertia_versus_fast_frequency_response_a_definition)
Your Paper/Point 1)
This paper seems to refer to FFR as synthetic inertia. It is clear in the article’s plot from Dalrymple that there is no 50-200msec delay they mentioned for the commencement of the response – the frequency measurement resolution in the plot is 20msec and the frequency rise and the real power response occur within one of these periods. I would expect such a delay with FFR for the reasons I discuss in the article and believe this is what they are capturing in their literature review.
That paper was submitted in 2018 and FFR has been a much more prevalent service in the market to date. I’m not aware of another grid forming inverter with Virtual Synchronous Machine software running in parallel to a large interconnected power system such as the NEM. This technology has typically been used for off-grid or smaller power system applications. Dalrymple is among the first and as such, there is still limited awareness and information on what can be achieved with this approach – hence my article.
Your Paper/Point 2)
Again, they are talking about FFR here. They say “delivering synthetic inertia and/or fast frequency control” which groups them as the same mechanism and then they discuss the same measurement and activation delays only relevant to FFR that I call out in the article. With the virtual inertia delivered at Dalrymple, it doesn’t rely on measurement to respond to RoCoF. There are two voltage sources (Dalrymple and the Grid) and whenever there is a difference in frequency between them, there is a real power transfer. Real power transfer is equal to the product of the two voltage magnitudes of the two sources divided by the coupling impedance multiplied by the sine of the phase angle difference – just like a spinning machine’s inertial contribution. (We have a paper that describes this in detail that I can potentially share with you once made public – appreciate that this comment forum may not clearly resolve all your queries.)
So the papers you reference are correct but discuss FFR – they aren’t applicable to the virtual inertia mechanism I discuss. There needs to be clearer definitions established to help understanding here and hopefully this happens soon.
To your final question, the response time in terms of the commencement of real power response to a RoCoF event is instantaneous as seen in in the article. The amount of real power, rise time and settling time are all tuneable in the Virtual Synchronous Machine software layer and are optimised for the application and point of connection through connection studies – but the start of the response is immediate.
Thanks for taking the time to comment – I hope this is useful.
Cheers
Stephen
Grid Forming / Grid Following are not types of inverters, they are modes of control. They can be changed/configured as requested. There are also other characteristics of being in grid forming mode here which are ignored. A hybrid model/approach is not discussed here at all. Some sudo-science wothout factual comparisons.
Thanks for you answer Stephen, the papers I reported missed some details on clarifying differences among virtual inertia / grid forming / virtual synchronous machine, I agree on that.
I’ll try now very quickly. Virtual Inertia emulates the inertia response of a traditional synchronous machine (SM) mathematically via pulse width modulation (PWM).
Virtual Inertia based inverters and their controls strategy can be implemented in various applications such as BESS, statcom, solar plant etc.
The objective of the VSM (Virtual Synchronous Machine) is to provide grid forming employing frequency droop and Virtual Inertia by using swing equation.
The emulation of the synchronizing torque in the transient domain is still subject to a delay because of the inherently ‘time constants’ of the inverter.
Therefore it’s impossible to have the same instantaneous synchronous inertia response of a synchronous generator.
This paper should definitely clarify every doubt on this topic:
https://www.mdpi.com/2076-3417/9/24/5300
About the plot and the measurement, using 20ms measurement resolution would never be enough to catch delays of 5ms or less.
Best
Great article. Excellent explanation on how grid forming inverters help maintain frequency and the difference between FFR and virtual inertia.
Thank you.
Hi people,
A BESS provides much faster response to system events then tradition gen sets, as there is more delay in goveners response and engine speed pick up etc.
A BESS will determine a frequency change in 10ms has it clocks the time a a voltage signal crossing the zero point, which occurs ever 10ms for 50Hz, plus a small processing delay, so realistically say around 20ms response. On the system we see response in under 200ms, which stops a blackout event. This seen on small systems, less than 10MW, using an ABB BESS.